footroll R&D V2
Tools & Techart Topics
update
since the previous post (found below) I havent had much time to look at or actually implement the system. Now I finally had some time to tinker around with the settings, I found the previous setup a bit clumsy and messy to work with. So I took the basics of the previous method and cleaned it up quite a lot.
Main issues that I found where in the control of the roll using a rotational value and the fact that the lift was controlled by an attrubite connected to a blendshape.
the basics are pretty much the same, as can be seen here
But the foot roll controller is now a 2d box type, this is inspired by the hand control I posted on twitter a few weeks ago. the box control is driving remap values to convert the limits in translation to rotations.
the same thing is then done to controll the lift of the foot, reversing the rotation on the toe and ball in the correct space of the control
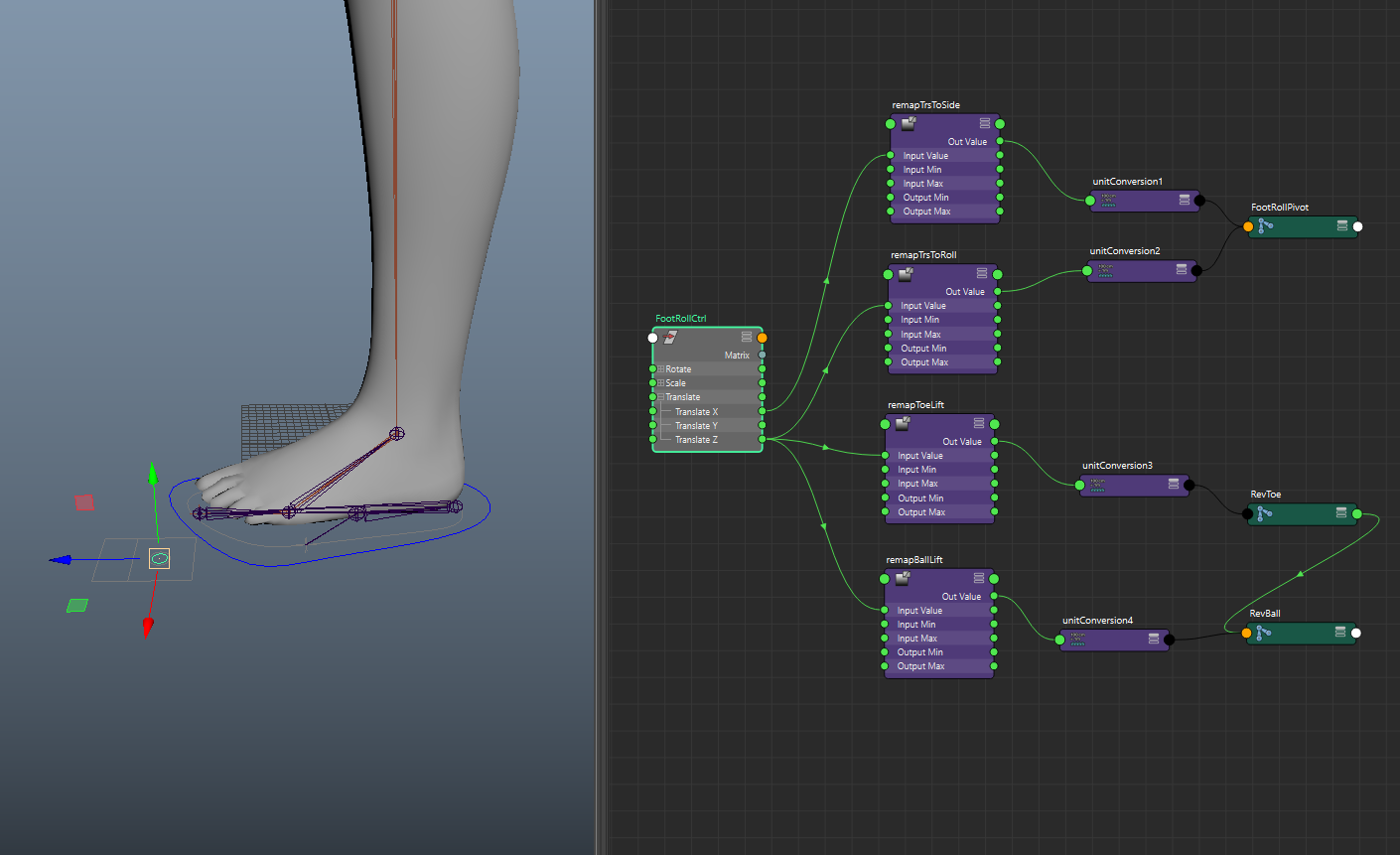
This all results in a clean setup with just a few nodes to keep track of, while only the locator that maps the point in worldspace needs to be kept out of the rig hierarchy it can probably be removed completely using some simple parent matrix calculations on the joint that gets the pointConstraint.
a new version of the rig can be found here:
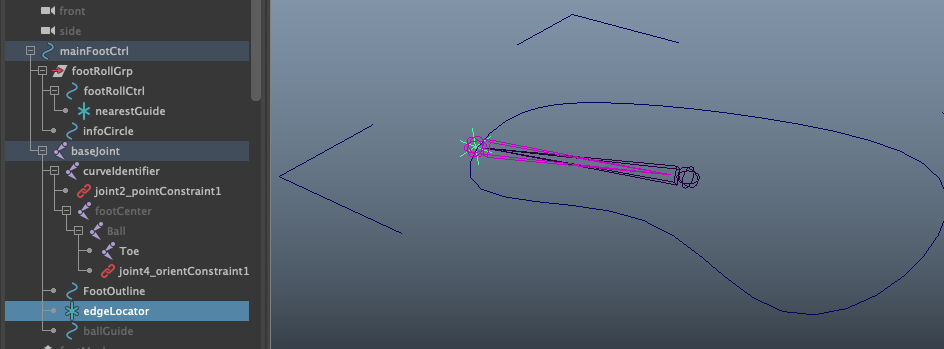
During one of the feedback sessions of the rigging for games course a student changed the setup in the footroll. The idea and question was to get more control as an animator, making sure that the pivot for banking and the footroll is exactly where the edge of the mesh is.
while talking about the possibilities for footroll setups I remembered a post created by Chris Lesagenew addition, and started creating my interpretation of this setup. it has some similarities and can probably even be joined together in some ways.
update: It seems that Armin Halacdid something similar.
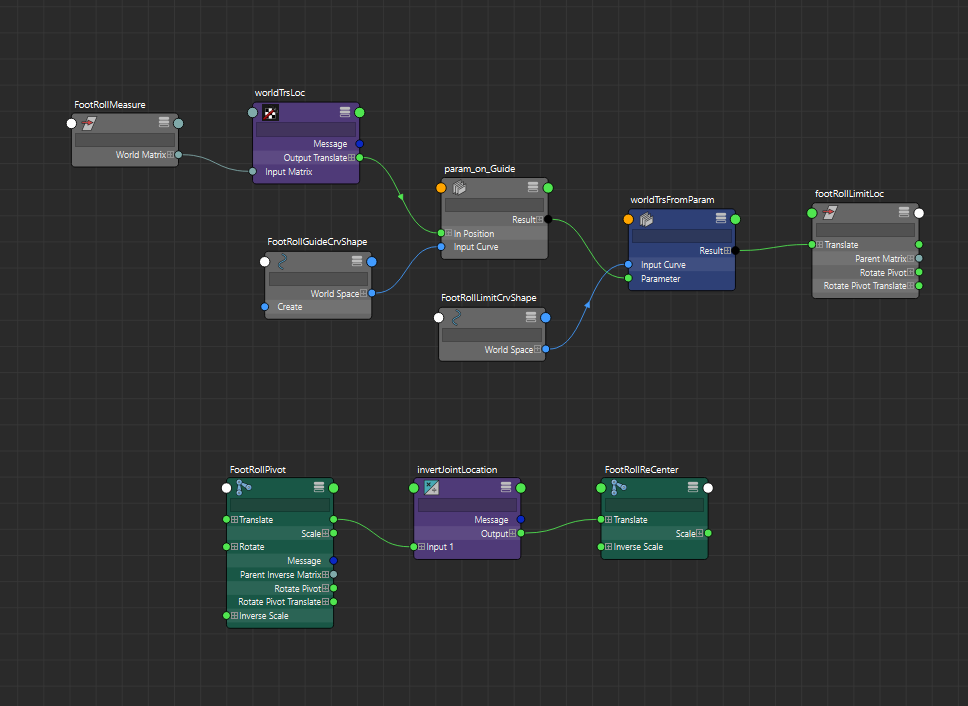
The setup exists out of a driver system and a driven system. The driver system is the footRollCtrl, this is what i usually use for driving the side to side and the full roll attached to it is a locator which will be the guide and in the parent of the footRollCtrl there is a perfect circle that we use to get information from.
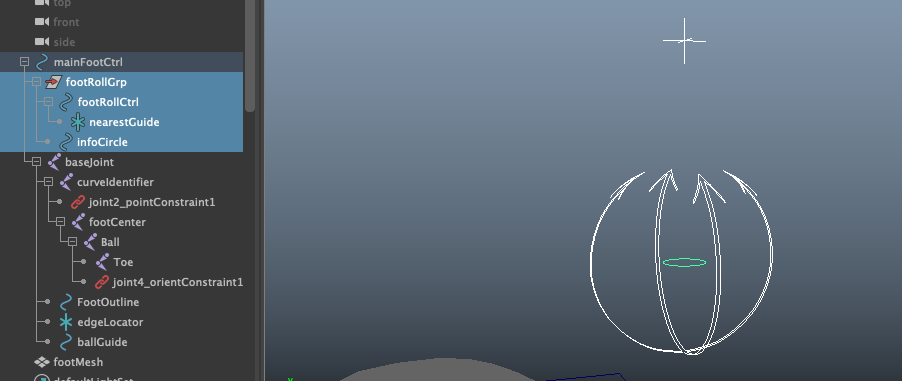
On the other end we have the reciever of the information. the curve in the shape of the foot is parented to the basejoint, the joint hierarchy underneath (curveIdentifier, footCenter) shares the same orientation. Using the information from the driver setup we can get the perfect point on curve placement to set the curveIdentifier. The footCenter is then calculated using the inverse translation of the curveidentifier.
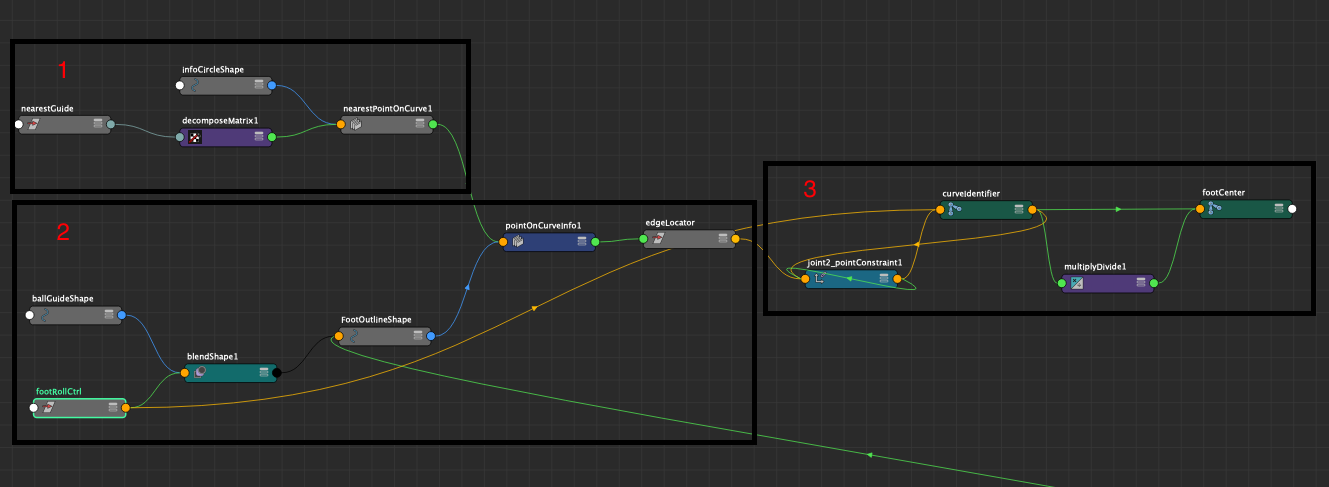
The nearestPointOnCurve is used in the driver setup to get the parameter, this parameter is used in the pointOnCurveInfo to gather the position from the distorted shape.
The nodegraph below shows the setup in more detail, i already added a blendshape to be able to shift the weight between toe and ball joints.
- driver setup
- distorted shape for information
- driven setup
For the people that want to have a better look here is the scene file: